ode: tutorial 3#
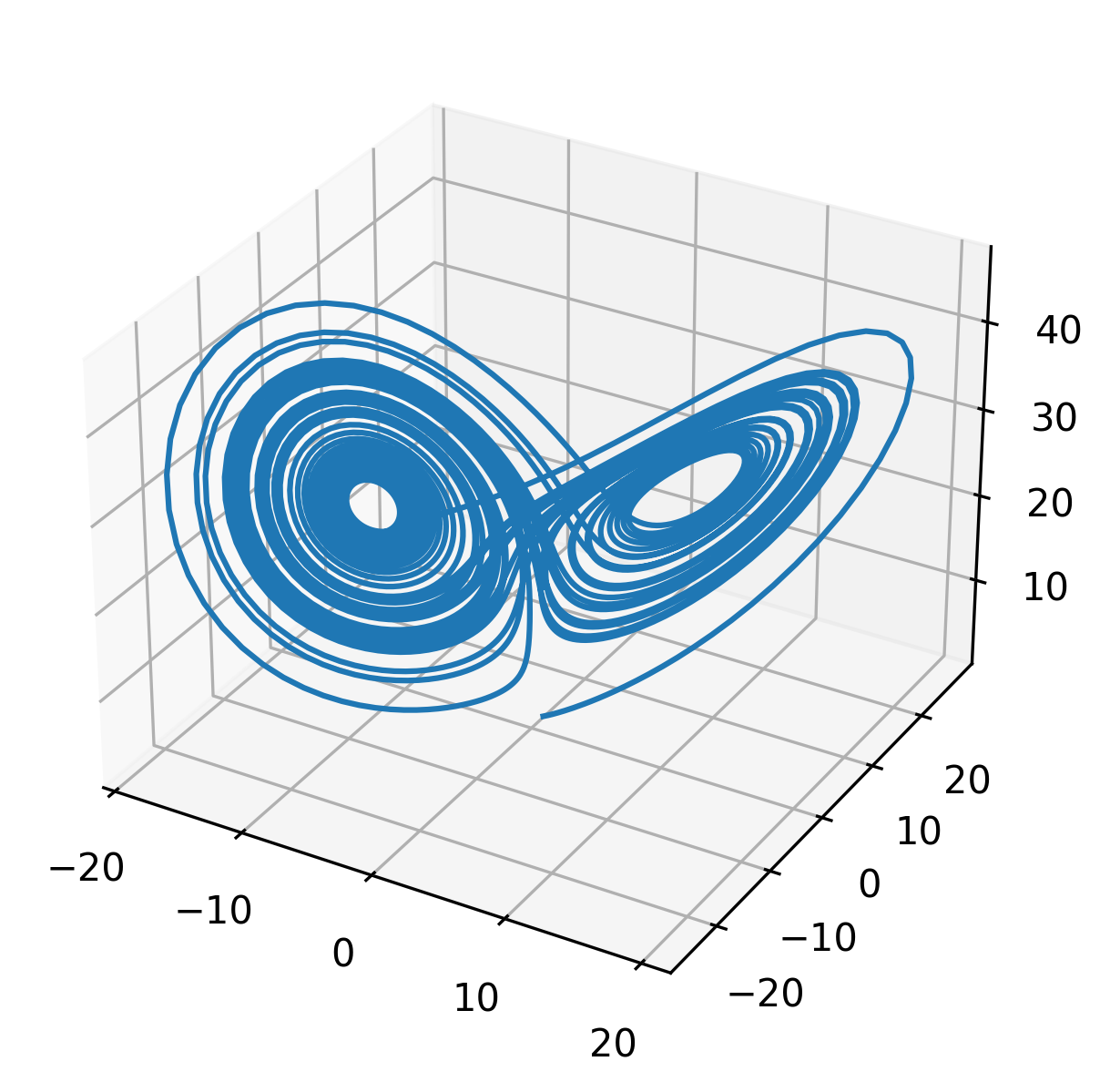
Integrate the original Lorenz system using implicit time integration.
#include "pressio/ode_advancers.hpp"
#include "pressio/ode_steppers_implicit.hpp"
#include <Eigen/Core>
template<class ScalarType>
class Lorenz3{
const int N_ = 3;
const ScalarType rho_ = static_cast<ScalarType>(28);
const ScalarType sigma_ = static_cast<ScalarType>(10);
const ScalarType beta_ = static_cast<ScalarType>(8)/3;
using trip_t = Eigen::Triplet<ScalarType>;
mutable std::vector<trip_t> tripletList_;
public:
using independent_variable_type = ScalarType;
using state_type = Eigen::Matrix<ScalarType,-1,1>;
using rhs_type = state_type;
// since the Jacobain of Lorenz3 is fairly dens,
// we could use a dense matrix for it, but we use a sparse one
// here for demonstration purposes
using jacobian_type = Eigen::SparseMatrix<ScalarType>;
Lorenz3(){
allocateTriplets();
}
state_type createState() const{
state_type s(N_);
s.setConstant(0);
return s;
};
rhs_type createRhs() const{
rhs_type v(N_);
v.setConstant(0);
return v;
};
jacobian_type createJacobian() const{
jacobian_type J(N_, N_);
J.setFromTriplets(tripletList_.begin(), tripletList_.end());
return J;
};
void rhsAndJacobian(const state_type & state,
const independent_variable_type timeIn,
rhs_type & rhs,
std::optional<jacobian_type*> Jopt) const
{
const auto x = state(0);
const auto y = state(1);
const auto z = state(2);
rhs(0) = sigma_ * (y - x);
rhs(1) = x * (rho_ - z) - y;
rhs(2) = x * y - beta_ * z;
if (Jopt)
{
auto & J = *Jopt.value();
tripletList_[0] = {0, 0, -sigma_};
tripletList_[1] = {0, 1, sigma_};
tripletList_[2] = {1, 0, rho_-z};
tripletList_[3] = {1, 1, -1.};
tripletList_[4] = {1, 2, -x};
tripletList_[5] = {2, 0, y};
tripletList_[6] = {2, 1, x};
tripletList_[7] = {2, 2, -beta_};
J.setFromTriplets(tripletList_.begin(), tripletList_.end());
}
};
private:
void allocateTriplets()
{
// first row
tripletList_.push_back( trip_t( 0, 0, 0.) );
tripletList_.push_back( trip_t( 0, 1, 0.) );
// second and third row
for (int i=1; i<=2; ++i){
tripletList_.push_back( trip_t( i, 0, 0.) );
tripletList_.push_back( trip_t( i, 1, 0.) );
tripletList_.push_back( trip_t( i, 2, 0.) );
}
}
};
int main(int argc, char *argv[])
{
pressio::log::initialize(pressio::logto::terminal);
using scalar_type = double;
using problem_type = Lorenz3<scalar_type>;
problem_type problem;
namespace pode = pressio::ode;
namespace plins = pressio::linearsolvers;
// create stepper
constexpr auto scheme = pode::StepScheme::BDF2;
auto stepper = pode::create_implicit_stepper(scheme, problem);
// linear and nonlinear solver
using fom_jacobian_t = typename problem_type::jacobian_type;
using linear_solver_t = plins::Solver<plins::iterative::Bicgstab, fom_jacobian_t>;
linear_solver_t linearSolver;
auto nonLinearSolver = pressio::create_newton_solver(stepper, linearSolver);
nonLinearSolver.setStopTolerance(1e-13);
auto y = problem.createState();
y(0) = 0.5; y(1) = 1.0; y(2) = 1.;
const scalar_type startTime{0.0};
const scalar_type finalTime{40.0};
std::ofstream myfile("state_snapshots.bin", std::ios::out | std::ios::binary);
pode::advance_to_target_point(stepper, y, startTime, finalTime,
// lambda to set the time step
[](const pode::StepCount & /*unused*/,
const pode::StepStartAt<scalar_type> & /*unused*/,
pode::StepSize<scalar_type> & dt)
{ dt = 0.01; },
// lambda to observe and write to file the state
[&](pressio::ode::StepCount step,
const scalar_type /*timeIn*/,
const typename problem_type::state_type & state)
{
std::cout << "saving state at = " << step.get() << "\n";
const std::size_t ext = state.size()*sizeof(scalar_type);
myfile.write(reinterpret_cast<const char*>(&state(0)), ext);
},
nonLinearSolver);
myfile.close();
pressio::log::finalize();
return 0;
}
Process results#
Move to <your-build-dir>/ode-using-eigen-types/tutorial3 and run:
./ode_eigen_exe3
python3 plot.py